
RTK is a positioning technique that solves accuracy, motion, and timing challenges, enabling satellite positioning systems to deliver highly precise location information.
Created roughly three decades ago, RTK has far surpassed the dreams of its pioneers. By correcting common inaccuracies in real time, RTK unleashed new possibilities for the use of positioning technology to revolutionize the way we work across countless industries including construction, agriculture, transportation, surveyor’s and UAV’s.
Early Beginnings

When it comes to Real Time Kinematic (RTK), full appreciation of its development trajectory means never forgetting its roots, especially the predecessor technologies and research steppingstones that advanced the use of the Global Positioning System (GPS) for static and kinematic surveying.
The history of RTK, we focus mostly on the 1980s to look at what confirmed or inspired further exploration of GPS for land and marine surveying and foreshadowed an intense period of development in the first half of the 1990s as geodesists, scientists and engineers tried to build the perfect system.
Today, RTK is a utility that powers workflows and technologies used every day — from faster surveying to finely-tuned machine control.
Pictured: Charles R. Trimble signs a gift agreement for Trimble’s first production GPS receiver at the Smithsonian Museum, Washington, in late 1985 or early 1986.
Using extra terrestrial systems for centimetre-level accuracy

The development of satellite geodesy would rest on the foundation of using phase differencing for high-accuracy baseline determination, such as was used with Very Long Baseline Interferometry (VLBI). GPS, which launched its first satellite in 1978, was designed to use code-based signals for real time accuracies of 3-5 metres horizontal and 10-15 metres vertical, but there was so much more potential.
Clever scientists determined they could use GPS satellites in a similar way, using two receivers to interpret its non-code signals, called carrier-phase signals, for precise measurement to the accuracy of centimetres. This was known as carrier-phase differential GPS positioning, and a host of individuals started developing software algorithms for extracting and processing that data, as well as developing techniques to improve GPS surveying capabilities.
One of those individuals was Dr. Benjamin W. Remondi, a GPS technologist for the National Geodetic Survey (NGS) who in the early 1980s began a long, productive career in static and kinematic positioning based primarily on GPS observations. His body of work over several decades included more than 50 technical papers on methods still in use today, such as the triple differencing method, the antenna exchange method, and the kinematic survey method. Researchers in the field would come to refer to him as “the father of Real Time Kinematic survey.”
Solving The Problem

RTK was created to solve GPS surveying problems, ensuring location measurements are always on point. But it’s evolved to become so much more.
RTK Applications
Real Time Kinematics (RTK)
Many applications require better accuracy than what GNSS/GPS positioning can provide by itself. In this context, RTK technology enables centimeter-level positioning accuracy.
In all GNSS positioning solutions, the position is computed by considering the distance between the receiver and GNSS satellites. This distance is calculated by multiplying the speed of light times the time taken for a signal to reach a GNSS receiver. Although this calculation is extremely simple, the signals propagation time is affected by several error sources, including satellite orbit and clock errors, as well as ionospheric and tropospheric effects. In the end, all these error sources contribute to inaccurate positioning.
What is RTK?
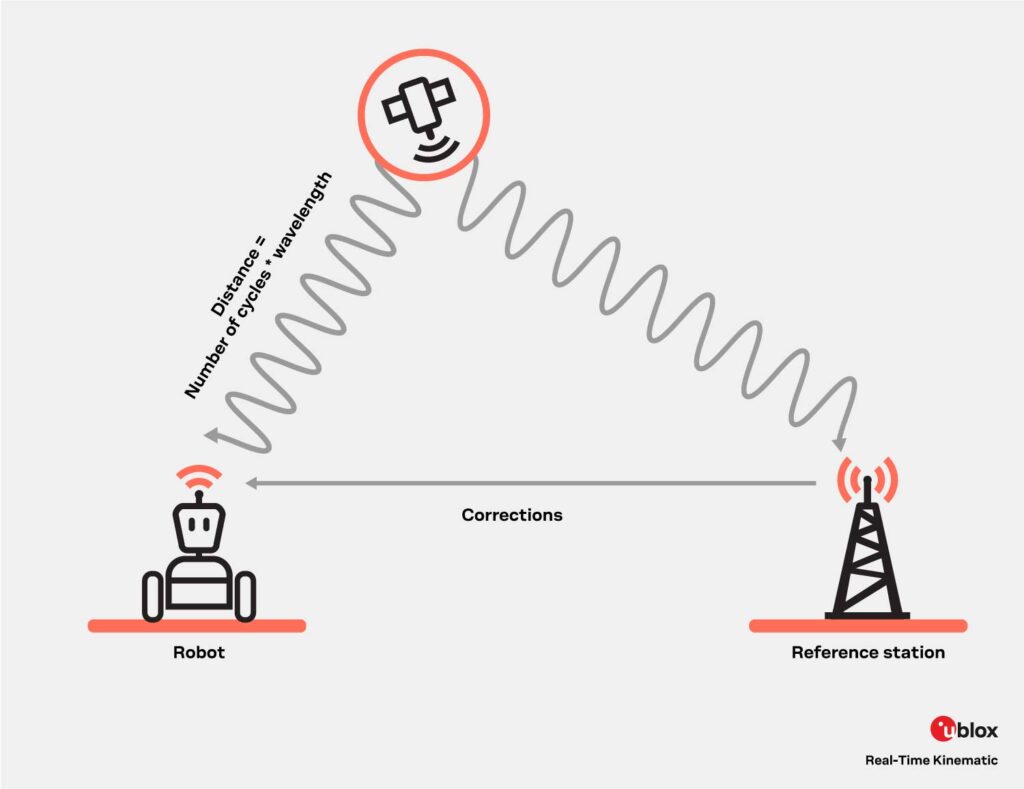
RTK and traditional GNSS positioning measure distance to satellites in a different way; RTK uses carrier-based ranging whereas GNSS positioning uses code-based ranging. The former method considers the number of wavelengths between satellites and GNSS receivers, providing better accuracy as there exists a considerable wavelength magnitude difference: the wavelength of the L1 signal is 19 cm whereas the PRN code frequency corresponds to a wavelength of about 300m. But since the carrier signal does not contain information like time stamps, calculating the number of wavelengths is quite complex. The process of resolving the unknown number of carrier cycle ambiguities as integers are key to RTK and cm-level accuracy.
Before Integer Ambiguity Resolution (IAR) can take place and for it to be successful, the errors in the signals must be corrected. The correction data is provided to the user receiver by a nearby local reference station, with a known position, or by a network of reference stations in a Network RTK setup.
Single station RTK
In its simplest form, an RTK solution makes use of a single reference station in close proximity to the user receiver. As the reference station is in a surveyed position, it can estimate the errors for each received GNSS signal. After error corrections have been communicated to the user receiver, IAR takes place. This principle works if the distance between the user and the reference station is reasonably short. When the distance between the user and the reference station grows too large, the atmospheric conditions at the two positions can differ. This may cause from unsuccessful IAR. A typical guideline for max distance can be 25 km.
Courtesy of uBlox